
Mi Raspberry Pi 3
Posted by Juan Marcano | Posted in Electrónica, Hardware, Software | Posted on 05-03-2019
0
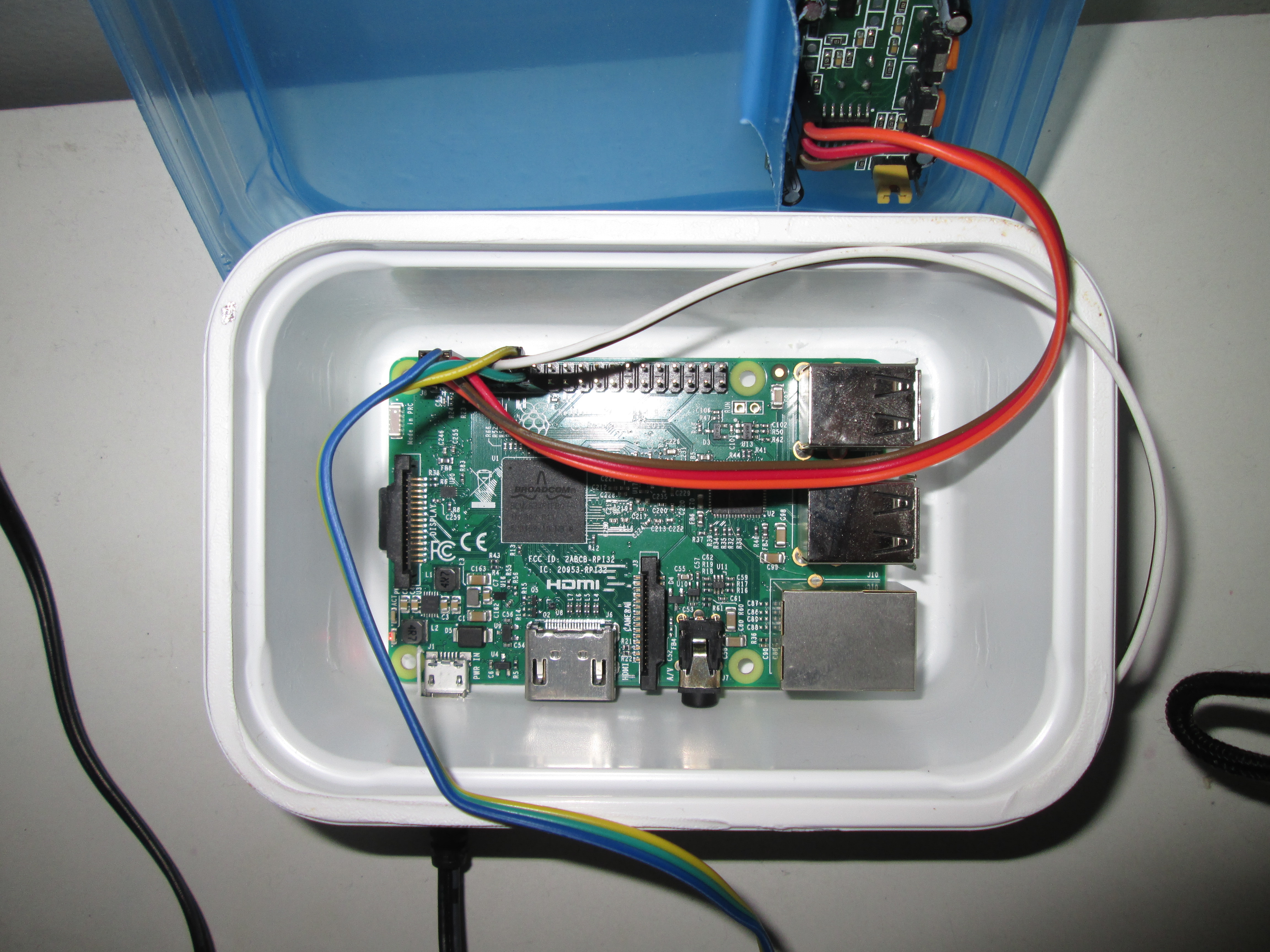
Ya hace algún tiempo vengo «cacharreando» mi raspi 3 como hobbie, usándolo como servidor y añadiendo varios sensores, he logrado en 2018 algunos avances desde que encontraba en la caja de mantequilla, se encuentra funcionando bastante estable.
Caja personalizada
Tiene ahora una nueva caja plástica a la cual he añadido un trípode que permite direccionar la camara. Hasta ahora mi raspi tiene los siguientes sensores:
- Cámara 5 mp.
- Sensor de temperatura y humedad dht22.
- Leds 5 mm: 1 x amarillo (status del programa de detección de movimiento con el sensor PIR),1 x rojo (pensado para indicar fallos, conexión al wi-fi por ejemplo), 1x RGB (uso general).
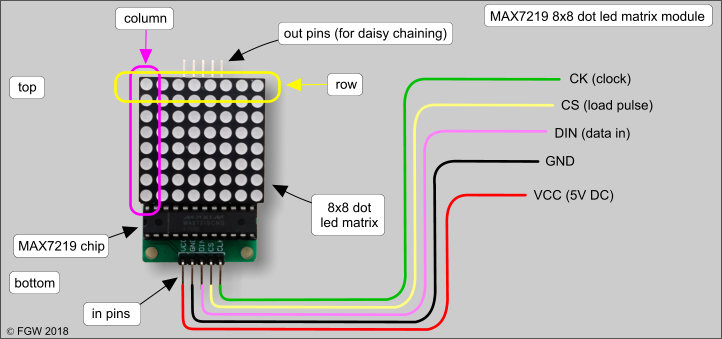
- Matriz de led 8×8 basado en MAX7219 para mostrar mensajes varios.
- 2 x pushbutton: los coloque para iniciar o detener servicios, hacer reboot,shutdown o general realizar cualquier acción que desee programar sin necesidad de acceder desde el teléfono o un computador.
- Sensor PIR HC-SR501, que detecta movimiento.
- Cámara 5Mp.
- Buzzer activo.
AnyDesk y VNC
En lo que respecta a software decidí colocar entorno de escritorio para facilitar mover archivos, programar y otras operaciones además de ser un medio adicional de conexión alternativo al ssh. Puedo acceder al escritorio por dos medios, usando Anydesk y VNC . El vnc resulta ser bueno para conexiones locales pero excesivamente lento para conexiones fuera de ella. 
Open VPN
El ISP del que dispongo en este momento tiene mi ip publica bajo una NAT, lo cierto es que me era imposible acceder por fuera de la red local al raspi. Lo solucione finalmente arrendando un servidor VPS, en el cual tengo algunos servicios de los que hablaré después. Pero entre ello instalé un servidor Open VPN y cliente en el raspi creando una VPN, para acceder desde internet a cualquier puerto del raspi se realiza una redirección desde el servidor VPS hacia el raspi, una gran ventaja del servidor VPS es disponer de una IP fija además de configurar e instalar lo que se nos antoje.
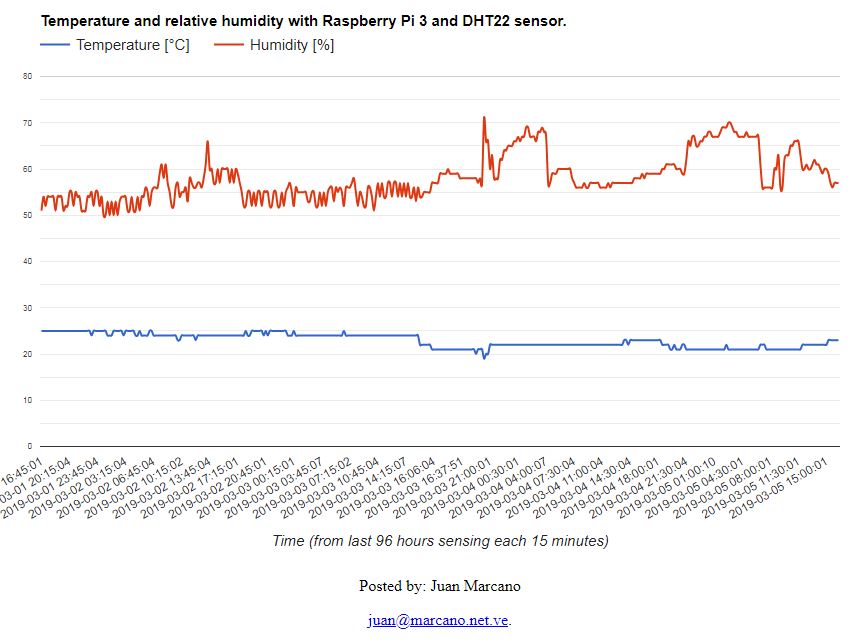
Sensor de temperatura y humedad DHT-22
Modifiqué un programa en C que lee el sensor PIR y lo combiné con el programa del PIR en lo que respecta a la conexión a la base de datos (mysql) y creación del archivo JSON. Por ahora lo se ejecuta con CRON cada 15 minutos. Y genera un gráfico usando google charts:
http://140.82.6.248:81/pi_server/temp_hum_DHT22
Módulo de cámara 5 mp y motion
Finalmente compré la raspi-cámara más económica que encontré, sin embargo me sorprendió la calidad de vídeos y fotografías que brinda.
Instalé el software motion, bastante poderoso que permite realizar capturas en foto y video cuando se detecta movimiento.
Permite realizar capturas snapshots cada cierto tiempo e incluso genera videos timelapse, es bastante configurable en el archivo motion.conf.
También hace streaming de video por lo que podemos visualizar desde la red local o internet.
https://motion-project.github.io/
Sensor PIR HC-SR501.
Ya había realizado un post acerca del sensor PIR, fué el primer sensor instalado, un programa en C almacena las detecciones en una base de datos (mysql)y se grafican con la ayuda de google charts: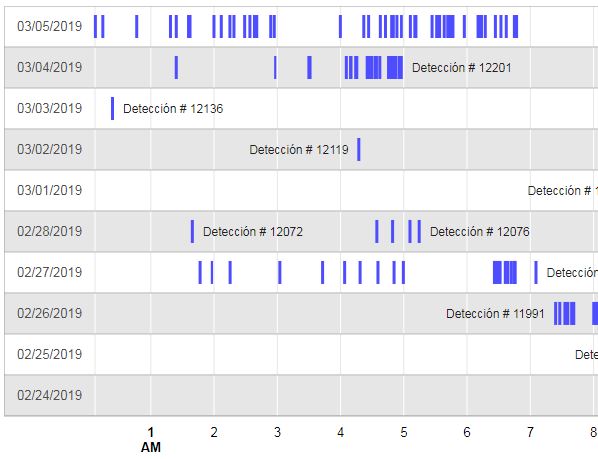 http://140.82.6.248:81/pi_server/movement_PIR/
http://140.82.6.248:81/pi_server/movement_PIR/
Matriz de led 8×8 MAX7219
Relativamente fácil de usar con python y la librería https://pypi.org/project/max7219/ , muy util para mostrar texto en desplazamiento y me sorprendio que es legible si se selecciona adecuadamente la velocidad de desplazamiento y la fuente. También despliega símbolos CP437. La pantalla la he programado en conjunto a los push buttons.
Eso es todo por ahora, estaré mejorando este artículo a medida que agregue nuevas mejoras.











 La idea es que ustedes mismos compren la pieza y lo cambien de manera sencilla, así se ahorran el costo de un taller y ademas se aprende algo nuevo.
La idea es que ustedes mismos compren la pieza y lo cambien de manera sencilla, así se ahorran el costo de un taller y ademas se aprende algo nuevo.









